| This page is updated on May 13, 2020.
SgtPepper about me page.
I like to make real working Technic models which can be operated either manually/electric or by NXT.
As you might suspect looking at my username, my other hobby is collecting Beatles records & memorabilia.
In my store I sell surplus parts & items I never use.
Here are some examples of the things I've made in the past.
Alouette II helicopter.
Features :
- Scale 1:14.
- All rotor controls (cyclic, collective & paddles) function like real.
- Motorised with 5292 motor.
- Free wheel function.
Dimensions :
- Length : 86 cm.
- Height : 27 cm.
- Rotor diameter : 74 cm.
Anything wrong with it?
- First of all, there are only two main-rotor-blades instead of three.
- The "Technic Ball with Grooves" (p/n 2907) in the swash plate is reworked (drilled out) to allow collective-sliding movement.
- The rotor blades are too heavy to function the way I intended it.
- A metal washer is used in the tailrotor.



More photos can be found here.
I hope to upload some detail pics in the future together with a short movie which will show the features in motion.
Bulldozer.
What started as experimenting with add/subtract-track-steering ended up as this bulldozer.
The main challenges for this model were :
- how to fit such a steering system in such a small housing
- how to find all those yellow coloured parts.
Well, for the latter (lucky for me) there is bricklink.
It took quite a few orders to get a complete set of yellow 8-tooth and 24-tooth gears.
The model runs very smooth and besides the add/subtract steering system it features :
- a 2-piston engine (ok, this is too small for a machine like this, but there just wasn't any more space left).
- a pneumatic blade control (up or down - forward push or side push).
- small track-guiding-gears following uneven surface.


More photos can be found here.
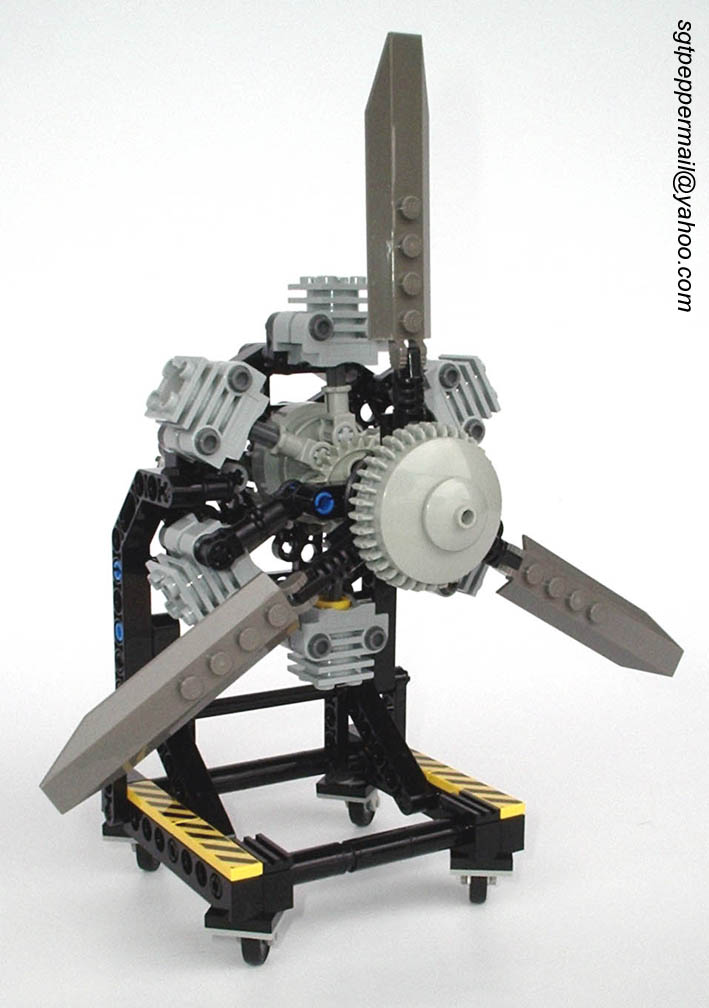
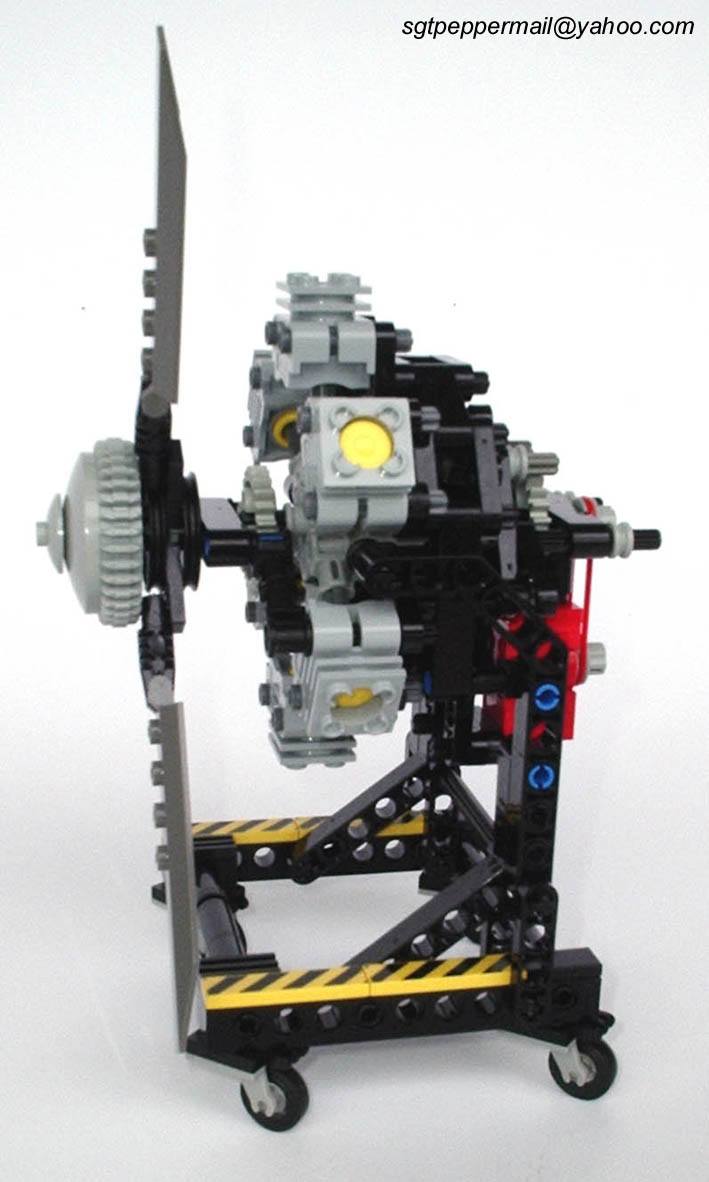
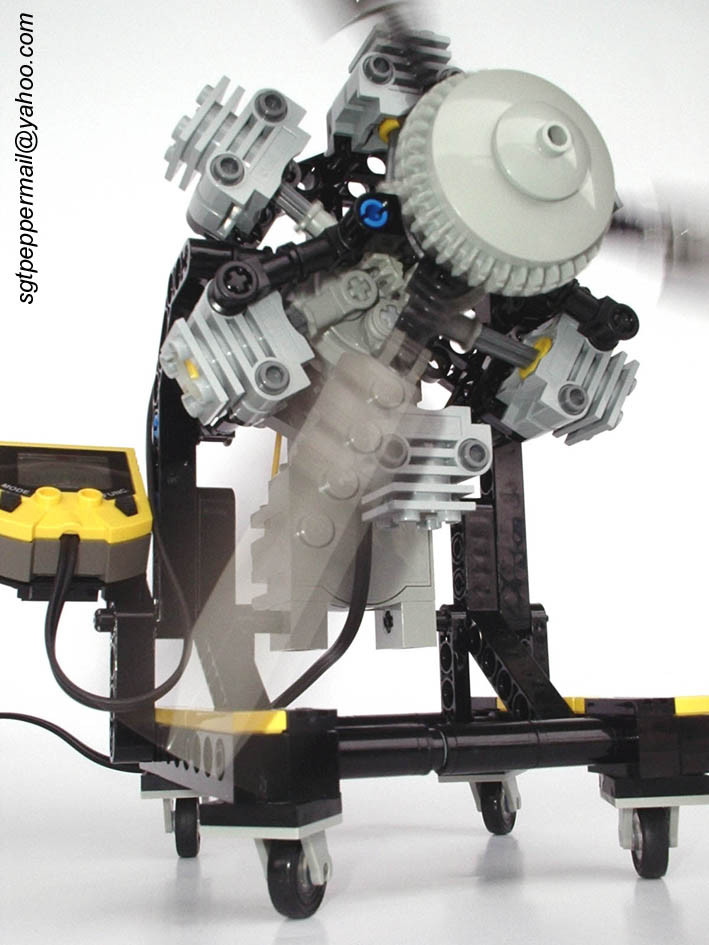
Aircraft Radial Engine.
After seeing some pictures of radial-engines on Brickshelf I decided to also have a go with this subject.
The result was this 6 cylinder radial engine on a maintenance / display dolly.
Real radial engines are single row 7 or 9 cylinder engines or double row 14 or 18 cylinder engines.
This can't be done with LEGO® parts, only an engine with 6 cylinders is possible (or 12 double row).
Although this model looks kind of fragile, it's actually quite strong and it runs extremely smooth.
But because it's a single row engine and there is no counter weight, it starts to vibrate at high speeds (500 rpm and higher).
More photos can be found here.
Front End Loader (8439).
I motorized this great model and it's completely controllable with 2 joysticks.
The left joystick is for driving (forwards / backwards) and steering (left / right).
The right joystick is for pneumatic control (4 movements).
The control unit houses :
- a battery box
- a two piston pneumatic pump
- a pressure relief valve
- two air tanks
- a pump rpm indicator
- 2 joysticks

More photos can be found here.
There is also a 'YouTube' Video here.
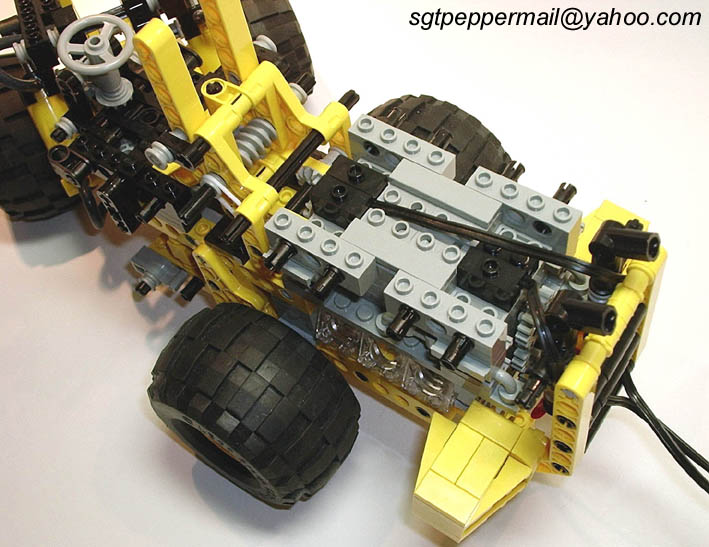
Prop plane (8855).
The only real problem with this model is that very poor 1-cylinder engine.
To do it justice I installed a proper 4-cylinder boxer engine on it and did some other design tuning using modern parts.
For motorizing the boxer engine I used the old style 4½V motor because of its small size and high rpm.


More photos can be found here.
Walking Robot.
This is the first model I made after I purchased the Mindstorms 2.0 set.
While it walks, it moves its arms and turns its head.
I used 3 touch-sensors to let the RCX control the 3 motors.
A lot of gear reduction is used to let it walk slow. Quick movements made it fall over.
It took me a lot of time to program, but in the end it turned out to be a fairly simple program.
In this short clip you can see how it walks.


More photos can be found here.
The picture on my ID-card is 'borrowed' from Digger Digger Dogstar | | This page has been viewed 4656 times. |
|